MAYA is an Autonomous Underwater Vehicle (AUV) developed in India by the National Institute of Oceanography (NIO) for scientific applications and is India’s first indigenously developed AUV. It is used for various oceanographic surveys and monitoring tasks in coastal waters, estuaries, rivers and even at open sea.
Historical Perspective: Autonomous Underwater Vessels
The first Autonomous Underwater Vehicle (AUV), named SPURV (Self-Propelled Underwater Research Vehicle), was developed in 1957 by the Applied Physics Laboratory at the University of Washington. Early AUVs were designed for military research, specifically for studying underwater diffusion and acoustic transmission.
Developmental Purpose
The initial development of AUVs focused on understanding underwater phenomena. The SPURV, for instance, was used to study diffusion, acoustic transmission, and submarine wakes. The Military Applications soon followed, and development was heavily funded by the US Navy. The resultant AUVs were used by the USA for military research purposes.
Developmental Scan
The SPURV was developed by Stan Murphy, Bob Francois, and Terry Ewart at the University of Washington’s Applied Physics Laboratory in 1957. In the 1970s, further developments occurred at MIT and also in the Soviet Union. Significant advancements in computing power and control algorithms allowed for more complex AUV designs and capabilities by 1980. The early 2000s saw various AUV types emerging, including screw-driven AUVs, underwater gliders, and Bionic AUVs.
Over time, the AUVs evolved from simple research tools to sophisticated platforms capable of various tasks, including deep-sea photography, survey technology, defence applications and even hurricane monitoring (Widditsch, 1973).
Countries Capable of Manufacturing AUVs
Several countries are manufacturing Autonomous Underwater Vehicles (AUVs), including the United States, China, Norway, and Japan. Other nations with significant AUV manufacturing capacity include the United Kingdom, France, Germany, South Korea, and Israel. India has now joined the bandwagon.
Global Applications of AUVs
Autonomous Underwater Vehicles (AUVs) have proven their utility by having a wide range of applications in the marine field. Since the 1990s, they have been increasingly used in the scientific, military, Police, and commercial sectors. Their ability to operate autonomously of their mother vessels made them well suited for operations in the extreme environments, covering the world’s deepest hydrothermal vents to beneath polar ice sheets. The primary applications comprised submarine volcanism and hydrothermal vent studies, mapping and monitoring of low-temperature fluid escape features and chemosynthetic ecosystems, benthic habitat mapping in shallow- and deep-water environments, and mapping of seafloor morphological features.
As AUVs can operate in deep waters, their underwater mapping capabilities were quite extensively used (Fig. 1). The ability of deep-water AUVs to fly relatively close to the seabed (< 5 m altitude in areas of low relief) meant that they were capable of collecting seafloor mapping, profiling and imaging data of far higher spatial resolution and navigational accuracy than surface vessels and towed instruments.
Fig:1- High-resolution AUV MBES bathymetry (left) and backscatter mapping (right)
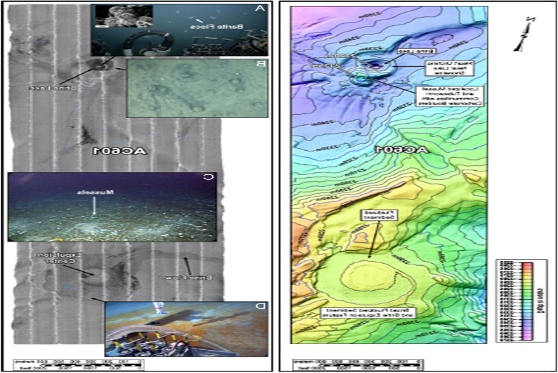
Image Courtesy: Science Direct
AUVs are now capable of carrying a variety of sensors, depending on the nature of the mission, like geophysical instruments, geochemical instruments (electrochemical redox sensors), seafloor-imaging tools (high-definition monochrome or colour cameras) and oceanographic instruments (CTD, Acoustic Doppler Current Profilers (ADCPs)).
As AUVs cannot operate everywhere, certain aspects need to be considered during their mission planning. AUVs can be influenced by tidal (or other) currents, causing crabbing of the vehicle and navigational drift, both of which can significantly affect data quality. AUVs, to some degree, are unsuitable for deployment in areas of high military, shipping or fishing activity, due to acoustic interference, collision risk, and net entanglement. Areas of high water-column turbidity hinder camera-based seafloor imaging, limiting its usage (Wynn et al, 2014).
India’s AUVs Journey
The Beginning:
India’s journey into Autonomous Underwater Vehicle (AUV) technology began with the development of Maya in the early 2010s. Later experience gained from Maya and Matangi, an autonomous surface vessel (Bot & Drone News India, 2024), helped in building better AUVs. A spark in this domain was seen with the launch of Neerakshi (Fig. 2), an AUV developed by Garden Reach Shipbuilders and Engineers (GRSE) and Aerospace Engineering Private Limited (AEPL), designed for mine detection and underwater surveys (Somish, 2023). Simultaneously, the Defence Research and Development Organisation (DRDO) began testing of a High Endurance Autonomous Underwater Vehicle (HEAUV) with a maiden surface run in March 2024 and lake trials in March 2025 (Menon, 2025).
Fig. 2 Early Indian AUVS Matangi (Left) and Neerakshi (Right)


Image: Courtesy Hindustan Times and Reddit
Maya Autonomous Underwater Vehicle
India had its ambitions of developing AUVs with increasing use of Autonomous Underwater Vehicles, as a new and powerful platform for generating ocean data. Council for Scientific and Industrial Research (CSIR), National Institute of Oceanography (NIO), and Indian Space Research Organisation (ISRO) jointly played a stellar role in the development of AUV.
The development of the “Maya” was initiated around 2006. Concerted efforts on the part of all the stakeholders and stringent testing made Maya an effective tool for conducting scientific experiments and underwater surveys in coastal waters, estuaries, rivers and dams. Starting with initial pool and fresh water dam tests, experience gained from numerous field tests, technological improvements, and continuous engineering development helped in a significant enhancement in the vehicle’s capabilities and reliability. All these developments and the pressing need for underwater environment awareness resulted in Maya being considered as an extended arm of the ships for remote sensing applications.
Vessel Characteristics
The original Maya AUV was a small, autonomous underwater vehicle developed by the National Institute of Oceanography (NIO) in Goa, India. It was designed for various oceanographic and naval applications, including coastal monitoring, environmental studies, and sea-mine countermeasures. The vessel has a slender-ellipsoid nose, which could be swapped out to accommodate different scientific payloads. Its key features were:
- Mechanical Design: The Maya AUV had a main pressurised hull, typically made of aluminium alloy, that housed the electronics, navigation sensors, batteries, and actuators for rudders and fins. It was designed for operations in the depths up to 200 meters.
- Navigation: The AUV used a Doppler Velocity Log and a MEMS Inertial Measurement Unit for navigation.
- Propulsion: It was propelled by a single rear thruster.
- Endurance: The Maya AUV had a typical endurance of 7.2 hours.
- Scientific Sensors: The nose cone was designed for an easy swap-out to accommodate different scientific payloads, allowing for flexibility in research applications.
- Acoustic Communication: Some versions of the Maya AUV were equipped with acoustic communication capabilities for monitoring the vehicle’s status and data quality during operations.
In detail, Maya’s mono hull structure was 23 cm in diameter and 174 cm long. A magnetically coupled underwater motor, placed at the rear, provided propulsive power to the vehicle. The vessel accomplished the heading and diving manoeuvres, using four control surfaces. When on the surface, Maya communicated with the ships using a high-speed radio link and drew on the Global Positioning System’s capabilities for navigation. During underwater missions, it used an acoustic Doppler Velocity Log (DVL). The required power for propulsion, as well as sensors and electronics, was supplied by high-energy density Lithium-ion polymer batteries, offering 182 Wh/kg. For desired performance control, guidance and navigation of the vehicle, a powerful computer acquires attitude, heading and velocity data. Low-level tasks like actuation, speed control and power monitoring were carried out using dedicated 8-bit microcontrollers. Provisions were also made for the Controller’s Area Network. The nose cone of the vessel was mission-specific, and had been designed for carrying a host of physical, chemical and biological (Fig. 3) sensors (Mascarenhas et al, 2012)
Fig. 3- OPTICAL MAYA with sensor suite consisting of Irradiance (Ed) and Radiance (Lu) radiometers and a fluorometer

Image: Courtesy NIO
Update on Maya
Post receipt of ToT from the National Institute of Oceanography, Larsen and Toubro (L and T) re-engineered the Maya AUV into multiple configurations suited for diverse applications. The L and T platform (representative image- Fig. 4) is quite versatile and, though easy to operate, is rugged in design for rough missions. Its dimensions, OD 240 to OD 325 / L 2000 to L 3250 mm, vary from configuration to configuration; it has an endurance / Top Speed of 8 hr and 5 knots, respectively. It can operate up to the depths of 300 / 600 m and weighs 75 / 250 kg, depending on configuration.
Figure 4: L and T MAYA AUV

Image: Courtesy L and T
The Payload options for Maya include Side Scan Sonar, Multiple Aperture Side Scan Sonar, Synthetic Aperture Sonar, Multi Beam Echo Sounder, Sound Velocity Profiler, CTD (Conductivity, Temperature and Depth), UW Camera, and Periscope Camera
The mission for which this AUV can be deployed covers Intelligence Surveillance & Reconnaissance, Rapid Environment Assessment, Mine Counter Measures, Anti-Submarine Warfare, training target, sub-sea surveys, and R&D (L and T, ND).
Applications In India:
Many AUVs are being deployed for basic applications like:
- Oceanography is used to help in oceanographic studies, including monitoring coastal waters, estuaries, rivers, and dams.
- Mine Countermeasures and mapping naval mines.
- Environmental Monitoring, to monitor changes in the environment, such as water quality or the abundance of marine life.
Other Applications
India, being a peninsular nation, has a vast, contiguous coastline. The Indian Ocean provides it with enormous opportunities as a commercial trade bridge between East and West. The majority of India’s trade is carried out through maritime routes. It reiterates the importance of major ports and harbours along the coast. In addition, India’s coastline has notable strategic assets as mentioned below:
- Nearby coastal islands
- Naval Commands and bases
- Major cities like Chennai, Mumbai, Vishakhapatnam, Mangalore, Cochin, etc.
- Special Economic Zones like (Kandla SEZ, Cochin SEZ, etc.)
- Naval Shipbuilding facilities.
- Missile testing facilities.
All the above assets are vulnerable to attacks by the adversary, and such attacks could be carried out by either state or non-state actors, subsea, posing a serious threat. To mitigate such threats, surveillance of the underwater domain is very important. That is where autonomous underwater vehicles like Maya will play a credible role in ensuring coastal security. The vessel can be used for the port and harbour surveillance, intelligence gathering and conducting search and rescue operations. Some specifically designed and equipped AUVs can help manned submarines in some notable operations, including intelligence gathering, oceanographic mapping and data collection as a buddy (Natarajan, 2023).
Key Players in the AUV Field in India
DRDO is the primary driver of indigenous AUV development in India. The Indian Navy, being the primary user of AUVs to meet its operational needs, helps in the R and D. Private Sector Companies like L&T, Alpha Design, and PSUs like MDL and GRSE are involved in developing and building various types of AUVs for the Indian Navy.
Challenges Faced by AUVs
Autonomous Underwater Vehicles (AUVs), though useful, do have significant technological limitations and face many challenges, including limited communication range and reliability, complex underwater environments, power and endurance constraints, and the need for robust control systems. Additionally, data acquisition and processing, particularly with underwater imaging and sensor integration, pose considerable hurdles. As AUVs often operate in teams, they require robust communication protocols for sharing mission information, control data, and scientific data, not an easy task to accomplish.
The Environmental Challenges cover an unpredictable underwater environment with varying currents, temperature gradients, and obstacles. The Turbidity (cloudiness) severely restricts visibility for camera-based systems, impacting navigation and object detection.
AUVs also need to withstand extreme pressure at depth and maintain watertight integrity, especially at actuator and sensor connections. Power and Endurance challenges cover Limited Battery Capacity, which restricts their endurance and range. Developing high-density, long-lasting energy storage and Efficient Power Management are thus key areas for research.
As far as Control and Navigation are concerned, AUVs exhibit complex, nonlinear dynamics influenced by hydrodynamic forces, making it challenging to design stable and accurate controllers. Precisely determining the AUV’s position and orientation in the underwater environment is essential for navigation and data acquisition, but executing the same poses challenges. Coordinating data from multiple sensors (cameras, sonar, etc.) and interpreting their information accurately is a complex task even for AI systems. Gathering extensive and diverse datasets for training AI engines for underwater tasks is time-consuming and challenging. The varying conditions across different underwater regions require region-specific AI models and data for optimal performance.
Developing intuitive and reliable human-machine interfaces for controlling and monitoring AUVs is crucial for seamless operation, but is challenging, as AUV development and deployment can be expensive, requiring specialised hardware, software, and expertise. Protecting AUVs from cyber threats and ensuring the confidentiality and integrity of collected data is also a difficult task (Hurtado, 2024).
AUV users also need to be conscious of the Environmental Impact, as AUVs can potentially disturb marine life, especially in sensitive areas, requiring careful mission planning and mitigation strategies.
The availability of skilled manpower in India to work on and maintain AUVs is also an impediment. Last but not least, developing underwater ISR is also a challenge for India, and it needs to work proactively in the development and deployment to catch up with other leading nations.
Though conscious efforts are being made to overcome the above-mentioned challenges, India still has some way to go in this field.
Future of AUVs in India
India is significantly expanding its use of Autonomous Underwater Vehicles (AUVs) for various applications, including marine research, defence, and oil and gas exploration. The country’s growing maritime interests and expanding defence capabilities are driving the development and deployment of AUVs with advanced sensors and navigation systems. India’s focus on indigenous defence manufacturing also contributes to the growth of the AUV market.
AUVs also have Strategic Importance as they are crucial for bolstering India’s maritime security, especially in the Indian Ocean Region (IOR) and Indo-Pacific Region, where China’s underwater presence is growing.
In future, AUVs are expected to be equipped with more sophisticated sensors, including sonar, cameras, and other instruments, as well as advanced navigation systems, for accurate underwater positioning and mapping, Advanced communication systems, including acoustic, UHF, C Band, and satellite communication (satcom), are being developed to ensure reliable data transfer in diverse underwater environments. Advanced AI and machine learning tools are expected to be integrated into AUVs for tasks such as autonomous navigation, object detection, and decision-making.
India may also collaborate with international partners on AUV technology development and deployment in the coming days to meet the emerging geopolitical challenges.
Conclusion
Autonomous Underwater Vessels/Vehicles (AUVs) represent a significant leap in India’s maritime capabilities, offering potential for enhanced surveillance, mine countermeasures, and scientific research. While technological advancements are promising, addressing regulatory gaps and ensuring robust performance in challenging underwater environments remain crucial for realising the full potential of AUVs in India’s defence and scientific endeavours.
Though AUVs hold immense potential to transform India’s maritime landscape, realising that potential would warrant concerted efforts for addressing technological, legal, and operational challenges. By investing in research and development, fostering collaboration between defence, research institutions, and industry, and establishing a clear regulatory framework, India can leverage the full capabilities of AUVs to enhance its maritime security and scientific endeavours.
Overall, the future of AUVs in India is bright, with significant potential for growth in defence, marine research, and other sectors. India’s commitment to self-reliance in defence and its growing maritime interests are driving the development and deployment of these advanced underwater vehicles. We need to thank Maya for launching India on this highly technological journey.
The author would like to conclude with the words of the Financial Express, which say it all: “As they navigate the underwater frontier, these unassuming submersibles have the power to reshape how we perceive, explore, and protect the world beneath the waves.”
Title image: Wiki
Disclaimer: The views and opinions expressed by the author do not necessarily reflect the views of the Government of India and Defence Research and Studies
References
- Widditsch, HR, 01 Oct, 1973, SPURV – The First Decade, PDF available through DTIC, Online, Retrieved from: https://apps.dtic.mil/sti/citations/ADA050816, Accessed on 25 Jul 2025
- Wynn Russell B, Veerle A.I. Huvenne, Timothy P. Le Bas, Bramley J. Murton, Douglas P. Connelly a, Brian J. Bett, Henry A. Ruhl, Kirsty J. Morris, Jeffrey Peakall, Daniel R. Parsons c, Esther J. Sumner, Stephen E. Darby e, Robert M. Dorrell, James E. Hunt, 01 Jun 2014, Autonomous Underwater Vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience, Marine Geology, Volume 352, 1 June 2014, Pages 451-468, online, Retrieved from: https://www.sciencedirect.com/science/article/pii/S0025322714000747#bb0585, Accessed on 25 Jul 2025
- Bot & Drone News India, 18 Nov 2024, Matangi Autonomous Vessel Completes Historic 1,500-km Voyage, Bot & Drone News India, Online, Retrieved from: https://botsanddrones.in/news/f/india%E2%80%99s-first-autonomous-vessel-completes-milestone-1500-km-voya, Accessed on 26 Jul 2025
- Admin, 07 Aug, 2023, The autonomous underwater vehicle Neerakshi is unveiled in India, Shomish, Online, Retrieved from: https://shomish.com/current-news-details.php/the-autonomous-underwater-vehicle-neerakshi-is-unveiled-in-india, Accessed on 26 Jul 2025
- Menon, Adhitya Krishna, 20 Apr,2025, India’s High Endurance AUV Program Undergoes Developmental Trials, Naval News, Online, Retrieved from: https://www.navalnews.com/naval-news/2025/04/indias-high-endurance-auv-program-undergoes-developmental-trials/. Accessed on 26 Jul 2025
- MASCARENHAS* A, NAVELKAR G, MADHAVAN R, DABHOLKAR N, PRABHUDESAI S, MAURYA P, DESA E, AFZALPURKAR S, SURESH T, MATONDAR P, MAHALUNKAR A, 2012, AN AUTONOMOUS UNDERWATER VEHICLE “MAYA”, FOR MONITORING COASTAL WATERS, ESTUARIES, RIVERS AND DAMS, NIO (DRS), online, Retrieved from: https://drs.nio.res.in/drs/handle/2264/4204, Accessed on 26 Jul 2025
- L and T, ND, Autonomous Naval Platforms, L and T, Online, Retrieved from: https://www.lntpes.com/our-offerings/marine-platforms-equipment-and-systems/autonomous-naval-platforms/, Accessed on 26 Jul 2025
- Natarajan Shree Gandhi G, 06 Sep, 2023, Autonomous Underwater Vehicles-A Force Multiplier to India’s Maritime Security, Defence Research and Studies (DRaS), Online, Retrieved from: https://dras.in/autonomous-underwater-vehicles-a-force-multiplier-to-indias-maritime-security/, Accessed on 26 Jul 2025
- Hurtado, Jorge, Feb 2024, What are the challenges facing autonomous underwater vehicles (AUVs)? , PRESCOUTER, Online, Retrieved from: https://www.prescouter.com/2024/02/challenges-facing-autonomous-underwater-vehicles-auvs/, Accessed in 26 Jul 2025